
Механический экран
Система для объемной визуализации изображения. Представляет собой небольшой программно-аппаратный комплекс, позволяющий выводить изображение, захватываемого камерами, посредством не яркости точки, а величиной выдвижения сегмента экрана (впрочем, механические конструкции могут быть любыми).
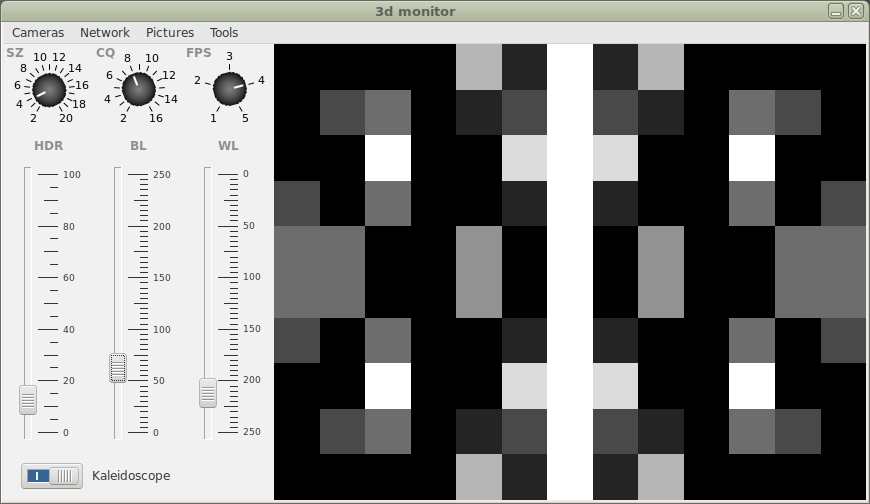
Основная программа
Занимается непосредственно захватом изображения с камер, его предварительной обработкой и выводом управляющих команд в порт для актуаторов.
Источниками изображения (в системе linux) могут служить:
- USB камеры;
- платы захвата видео сигнала;
- сетевые камеры;
- предварительно подготовленные видео ролики;
- статичные картинки.
Для ОС MS Windows список источников ограничен исключительно локальными средствами захвата видео и статичными картинками.
Предварительная обработка изображения, в основном, сводится к настройкам уплотнения (псевдо HDR) и пороговым значениям белого и черного. Она работает только в режиме захвата видео с камер. Для записанных роликов и пиктограмм предполагается, что они уже максимально адаптированы к методу вывода и не нуждаются в дополнительной подгонке.
Эффект HDR настраивается по плотности и радиусу анализируемого окружения точки.
Дополнительно, программа может работать в режиме калейдоскопа, дублируя верхнюю левую четверть изображения на остальные его части.
Для всех режимов обработки имеется предварительное деление на количество градаций яркости (CQ), позволяющее в большей степени упростить картинку на физическом "экране" и частота вывода кадров (FPS), влияющая на интенсивность работы моторов и "гладкость" изображения.
Настройки
Включают конечное разрешение экрана в точках по вертикали и горизонтали, предельных значений PWM для управления двигателями и параметры последовательного порта вывода команд.
Для каждого актуатора прописываются координаты точки, которые он обслуживает. Таким образом, физический "экран" может иметь любую форму.
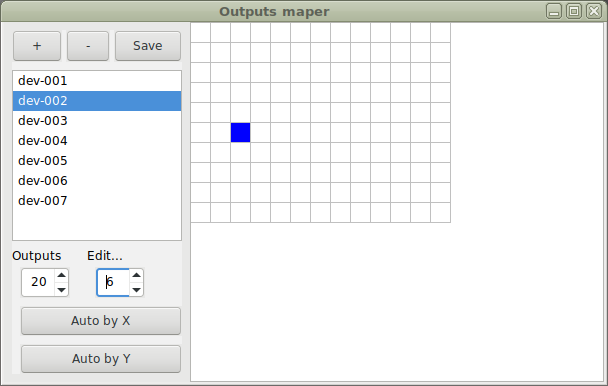
Для упрощения процедуры задания координат, в состав системы входит соответствующая утилита.
Так же, в файле настроек хранятся и адреса используемых IP камер, что позволяет быстро их подключать во время работы программы, простым выбором из меню.
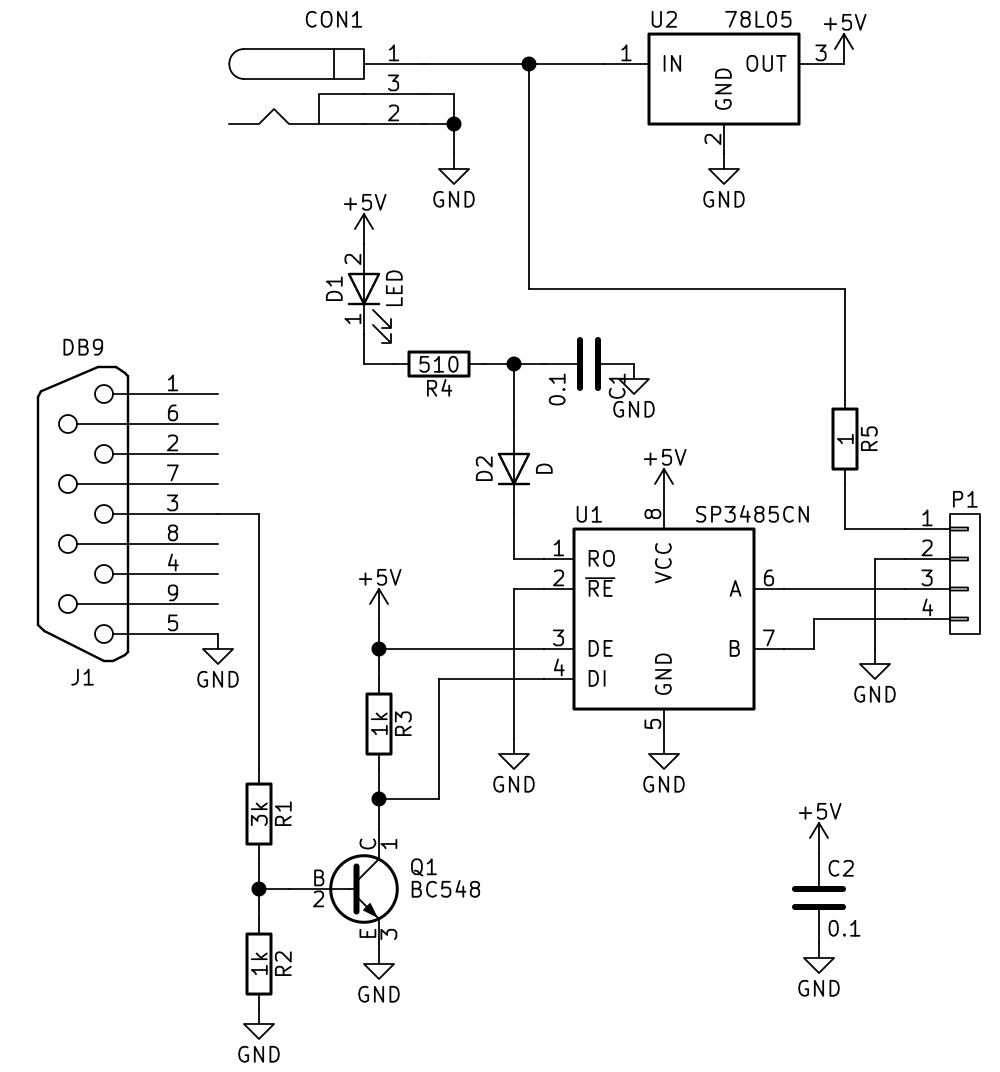
Оборудование
В системе, на данном этапе, используются контроллеры системы доступа, обладающие большим количеством выходов и снабженные альтернативной прошивкой, заставляющей их работать в режиме PWM.
В качестве актуаторов (как бюджетное решение) используются сервоприводы от аппаратуры пропорционального радиоуправления.
В целом, электромеханическая часть системы иожет быть пересмотрена под конкретную реализацию (например, дискретный экран с соленоидами в качестве актуаторов).
В качестве передатчика для линии RS-485 может использоваться как стандартный адаптер, так и минимальный конвертер для интерфейса RS-232 в RS-485.
 |
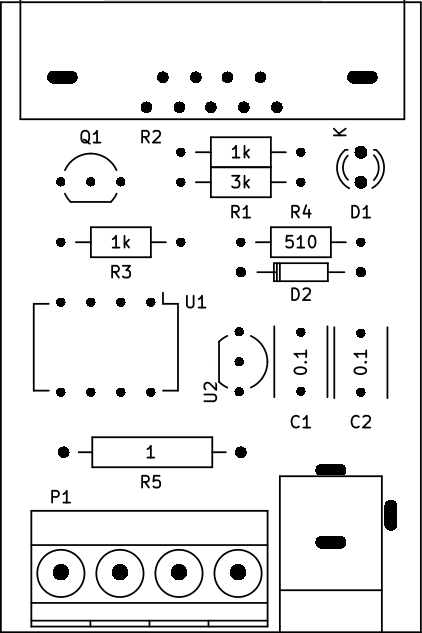 |
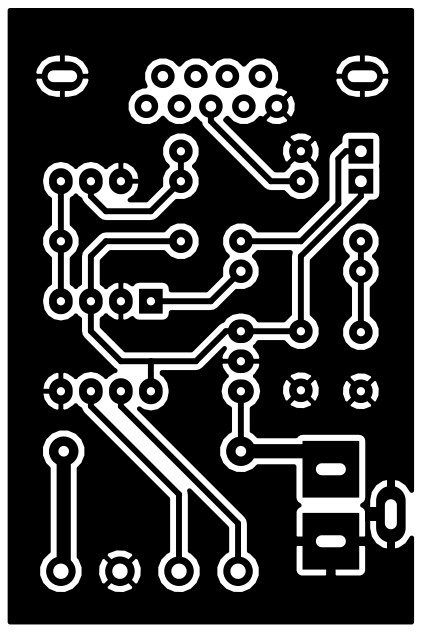
Рисунок платы имеет разрешение 300 dpi.
Технологии
Проект написан в среде разработки CodeTyphon для FPC. В Linux используется мультимедийный фреймворк FFMPEG, в MS Windows - DirectShow.